OpenCV4 for CUDA安装
OpenCV提供图像处理过程中的基础API,所以首先完成OpenCV4的构建。为了利用Jetson平台拥有CUDA加速的优势需要先安装OpenCV的CUDA版本。(Jetpack默认为非CUDA版本)
如果是Jetson Nano平台需要先扩大Swap分区至4G以上,避免因为内存不足终止编译。
可以使用Jtop工具扩展Swap分区。
更新安装包
1
2
3
4
| sudo apt update
sudo apt install -y build-essential cmake git libgtk2.0-dev pkg-config libswscale-dev libtbb2 libtbb-dev
sudo apt install -y python-dev python3-dev python-numpy python3-numpy
sudo apt install -y curl
|
安装视频和图片依赖
1
2
3
4
| sudo apt install -y libjpeg-dev libpng-dev libtiff-dev
sudo apt install -y libavcodec-dev libavformat-dev
sudo apt install -y libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev
sudo apt install -y libv4l-dev v4l-utils qv4l2 v4l2ucp libdc1394-22-dev
|
克隆OpenCV和OpenCV_Contrib源码
1
2
| curl -L https://github.com/opencv/opencv/archive/4.5.3.zip -o opencv-4.5.3.zip
curl -L https://github.com/opencv/opencv_contrib/archive/4.5.3.zip -o opencv_contrib-4.5.3.zip
|
解压缩包
1
2
3
4
5
| unzip opencv-4.5.3.zip
unzip opencv_contrib-4.5.3.zip
cd opencv-4.5.3/
mkdir build
cd build/
|
使用Cmake编译工程
1
2
3
4
5
6
7
8
9
10
11
| cmake -D WITH_CUDA=ON \
-D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-4.5.3/modules \
-D WITH_GSTREAMER=ON \
-D WITH_LIBV4L=ON \
-D BUILD_opencv_python2=ON \
-D BUILD_opencv_python3=ON \
-D BUILD_TESTS=OFF \
-D BUILD_PERF_TESTS=OFF \
-D BUILD_EXAMPLES=OFF \
-D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local ..
|
编译和安装
1
2
| make -j6
sudo make install
|
查看是否安装成功
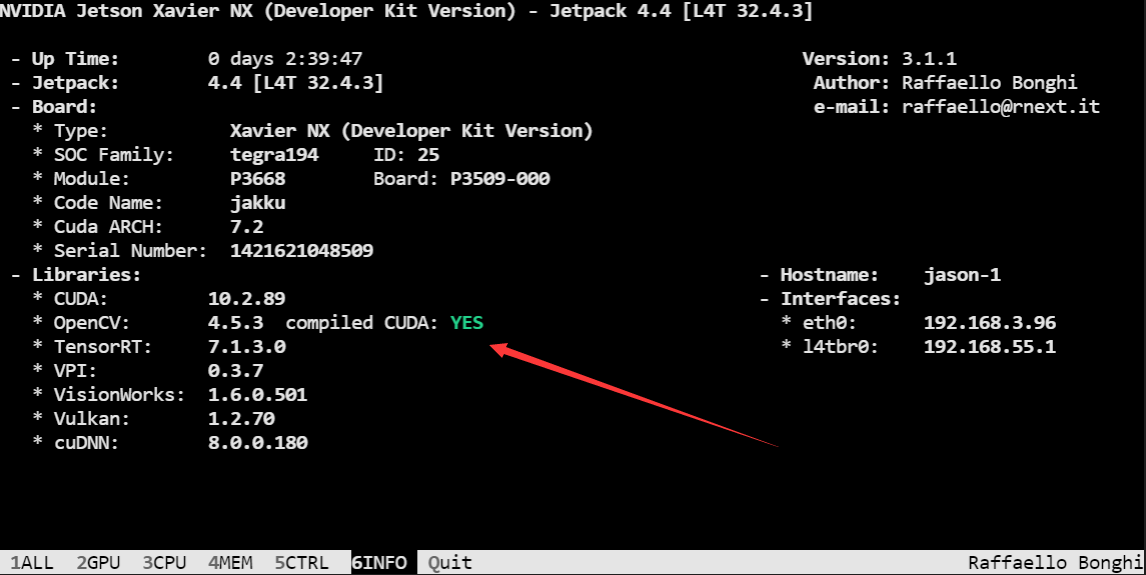
安装ROS全家桶
添加软件源
1
| sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
|
添加密钥
1
| curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
|
更新软件源
安装ROS
1
| sudo apt install ros-melodic-desktop-full
|
配置环境变量
1
2
| echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
|
安装额外依赖
1
| sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
|
安装rosdep
1
| sudo apt install python-rosdep
|
初始化rosdep
1
2
| sudo rosdep init
rosdep update
|
注:确保已接入外网环境
安装Intel® RealSense™ SDK
感谢Jetsonhacks提供的安装脚本:https://github.com/jetsonhacks/installRealSenseSDK.git
请先克隆仓库,然后进行修改。
1
| git clone https://github.com/jetsonhacks/installRealSenseSDK.git
|
根据具体情况将版本做了一些修改:
1
2
3
4
5
6
7
8
9
| #!/bin/bash
# Builds the Intel Realsense library librealsense on a Jetson NX
# Copyright (c) 2016-21 Jetsonhacks & Jason_xy
# Jetson NX; L4T 32.4.3[Jetpack 4.4]
#2021-8-17
LIBREALSENSE_DIRECTORY=${HOME}/librealsense
LIBREALSENSE_VERSION=v2.48.0
INSTALL_DIR=$PWD
NVCC_PATH=/usr/local/cuda-10.2/bin/nvcc
|
执行脚本
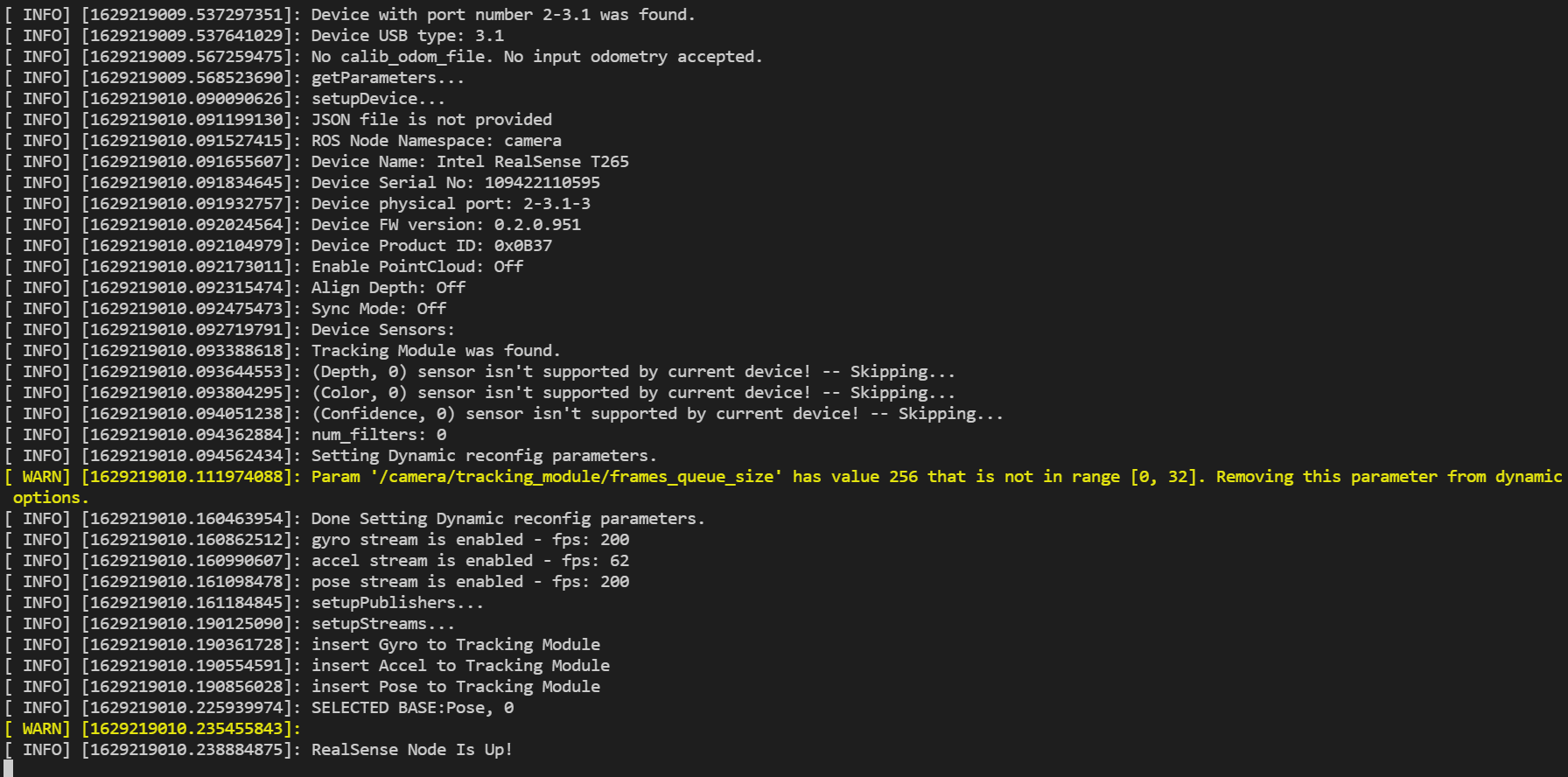
执行结果
安装realsense-ros
创建工作区
1
2
| mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
|
克隆源码仓库
1
2
3
4
| git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
|
构建模块
1
2
3
| catkin_init_workspace
cd ..
catkin_make clean
|
解决问题
cv_bridge
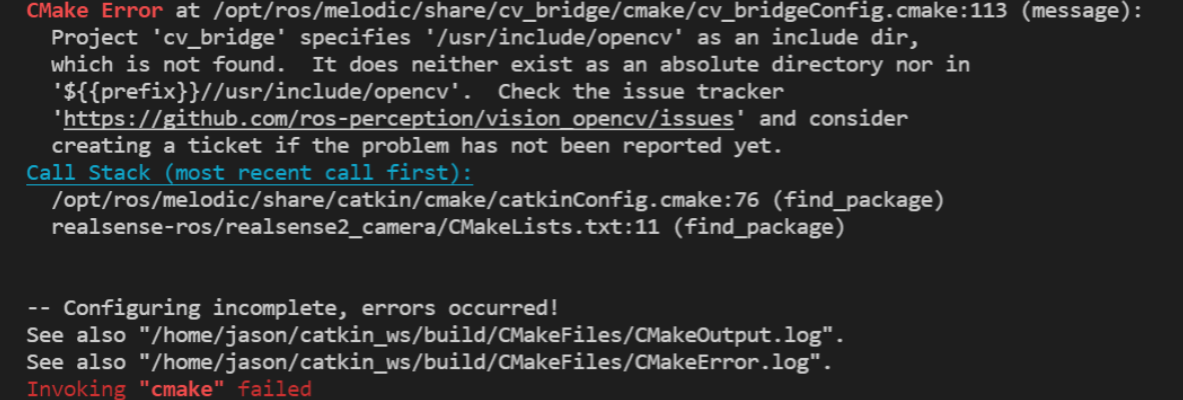
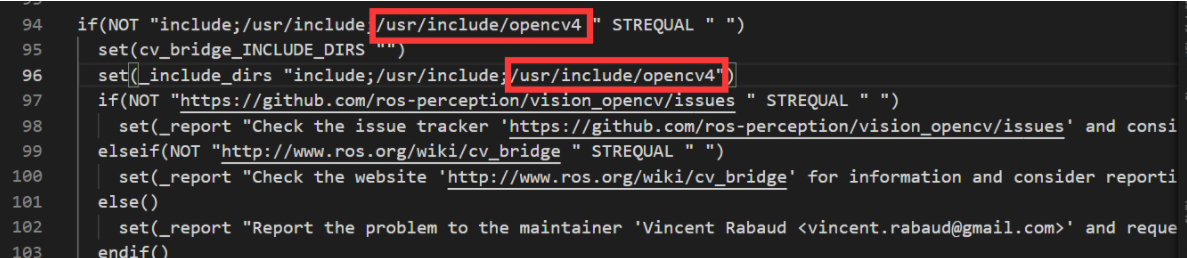
修改cv_bridge配置文件,将API对接到安装的OpenCV4 with CUDA
修改文件/opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
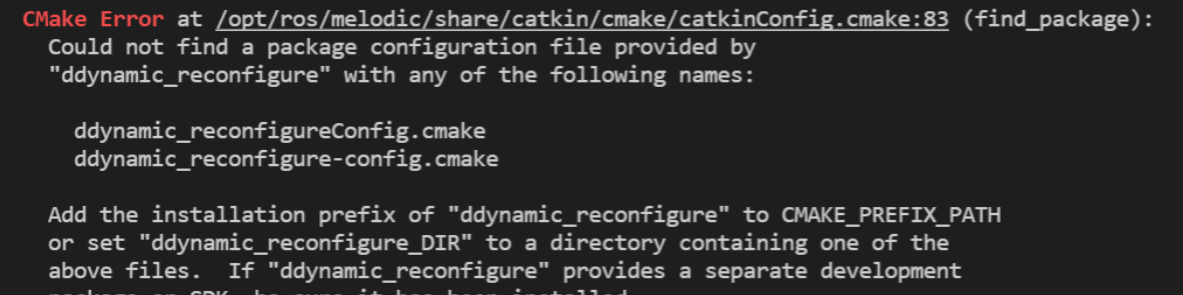
安装ddynamic_reconfigure:
1
| sudo apt-get install ros-melodic-ddynamic-reconfigure
|
继续构建
1
2
| catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
|
添加环境变量
1
2
| echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
|
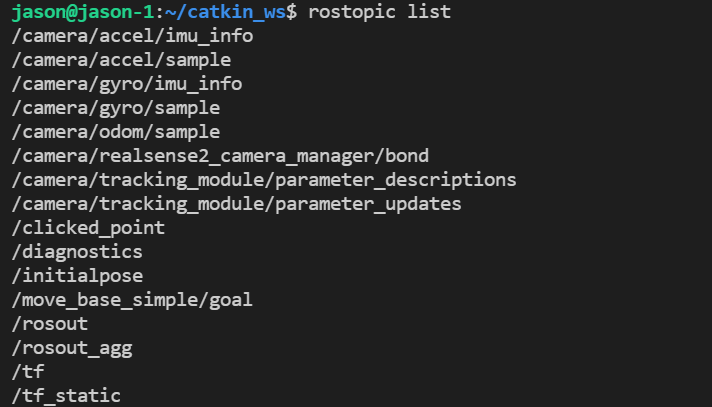
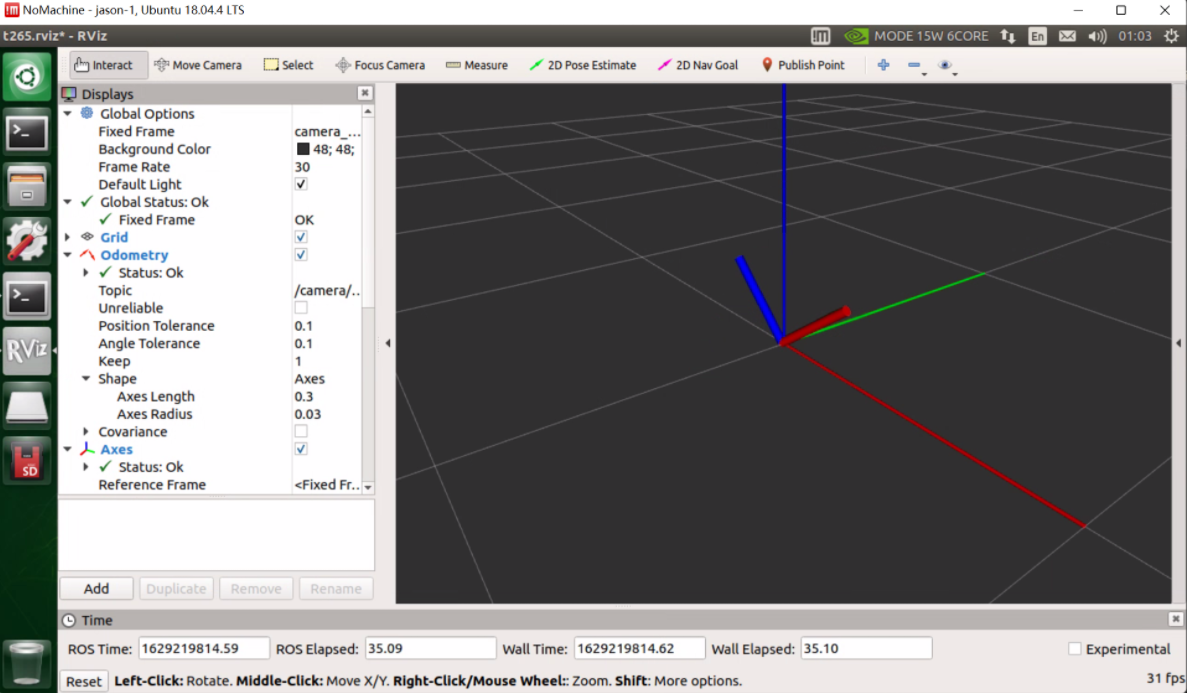
成功运行