任务管理
任务概念
- 任务是一个程序运行的实体,资源占用的基本单位,也可能是系统调度的基本单元。
- 动态性、并发性、异步独立性。
- 一个任务也称作一个线程。
任务描述
1
2
3
4
5
6
7
8
9
10
11
| OSTCBStkPtr
OSTCBNext
OSTCBPrev
OSTCBDly
OSTCBStat
OSTCBPrio
OSTCBX
OSTCBY
OSTCBBitX
OSTCBBitYCOPY
|
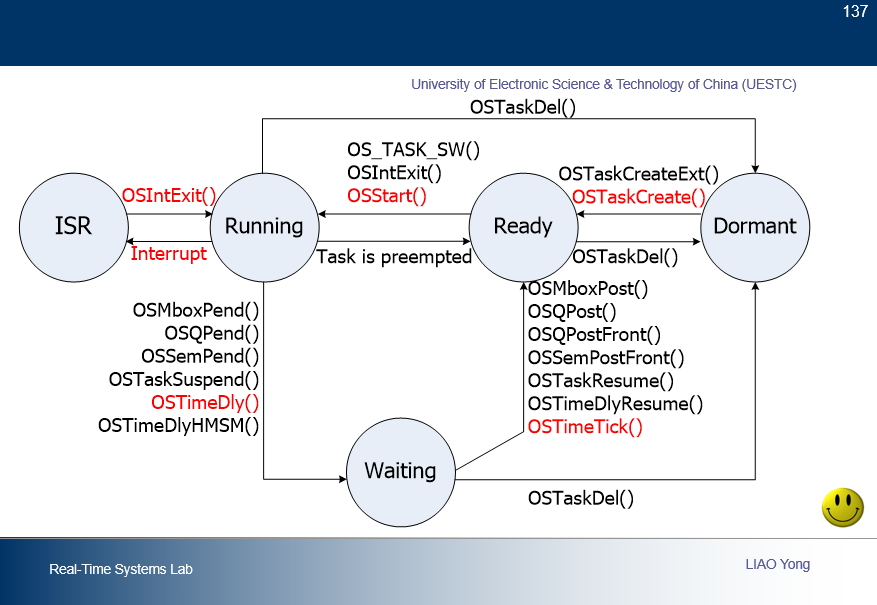
任务状态
睡眠状态、就绪状态、运行状态、等待状态、中断服务状态。
任务创建
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
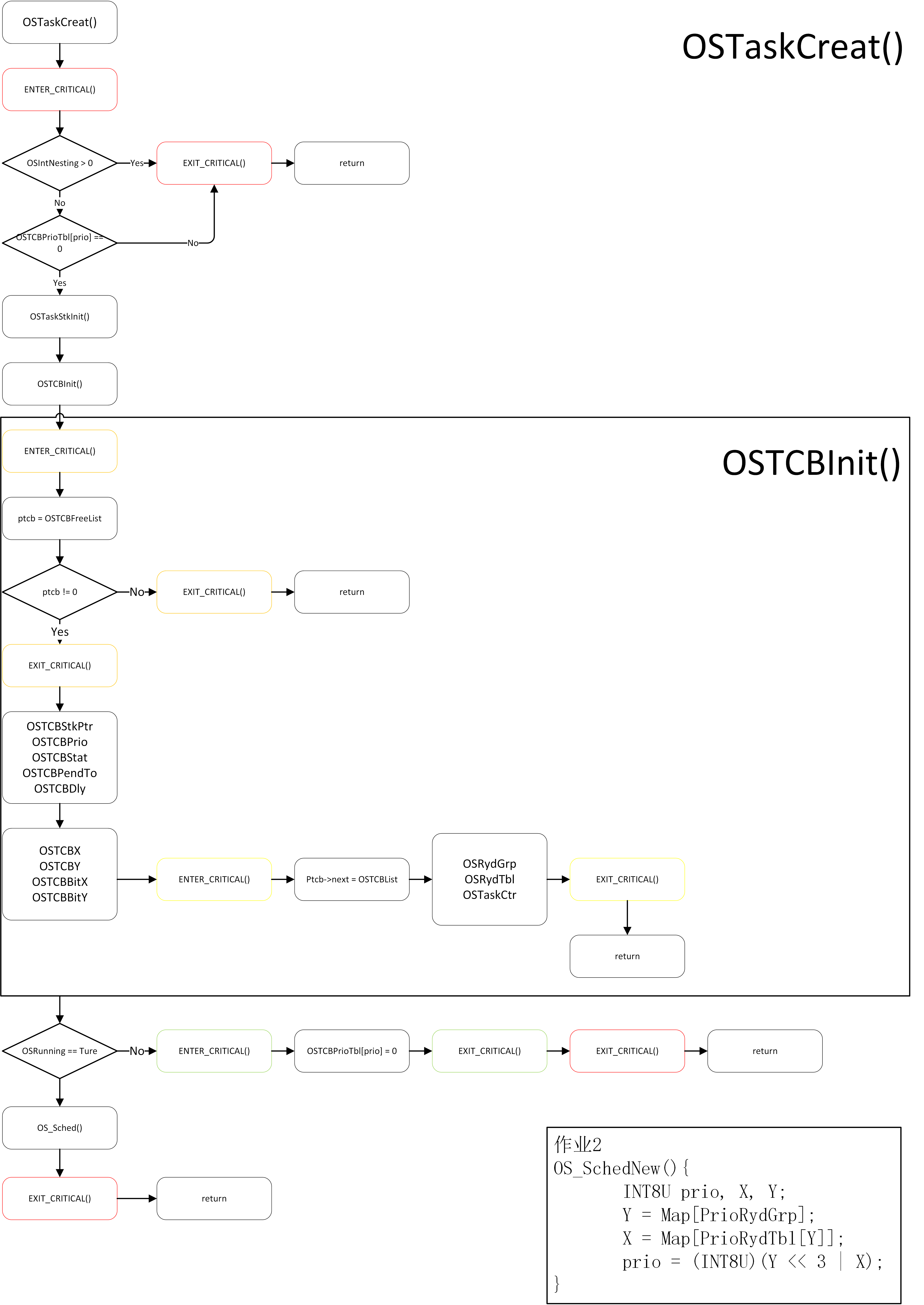
| INT8U OSTaskCreate (void (*task)(void *p_arg), void *p_arg, OS_STK *ptos,INT8U prio)
{
OS_STK *psp;
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr = 0;
#endif
OS_ENTER_CRITICAL();
if (OSIntNesting > 0) {
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_CREATE_ISR);
}
if (OSTCBPrioTbl[prio] == (OS_TCB *)0) {
OSTCBPrioTbl[prio] = (OS_TCB *)1;
OS_EXIT_CRITICAL();
psp = (OS_STK *)OSTaskStkInit(task, pdata, ptos, 0);
err = OS_TCBInit(prio, psp, (OS_STK *)0, 0, 0, (void *)0, 0);
if (err == OS_NO_ERR) {
OS_ENTER_CRITICAL();
OSTaskCtr++;
OS_EXIT_CRITICAL();
if (OSRunning == TRUE) {
OS_Sched();
}
}else {
OS_ENTER_CRITICAL();
OSTCBPrioTbl[prio] = (OS_TCB *)0;
OS_EXIT_CRITICAL();
}
return (err);
}
OS_EXIT_CRITICAL();
return (OS_PRIO_EXIST);
}
COPY
|
装入优先级位图
用优先级初始化参数
1
2
3
4
| ptcb->OSTCBY = prio >> 3;
ptcb->OSTCBBitY= OSMapTbl[ptcb->OSTCBY];
ptcb->OSTCBX = prio & 0x07;
ptcb->OSTCBBitX = OSMapTbl[ptcb->OSTCBX];COPY
|
更新位图
1
2
| OSRdyGrp |= ptcb->OSTCBBitY;
OSRdyTbl[ptcb->OSTCBY] |= ptcb->OSTCBBitX;COPY
|
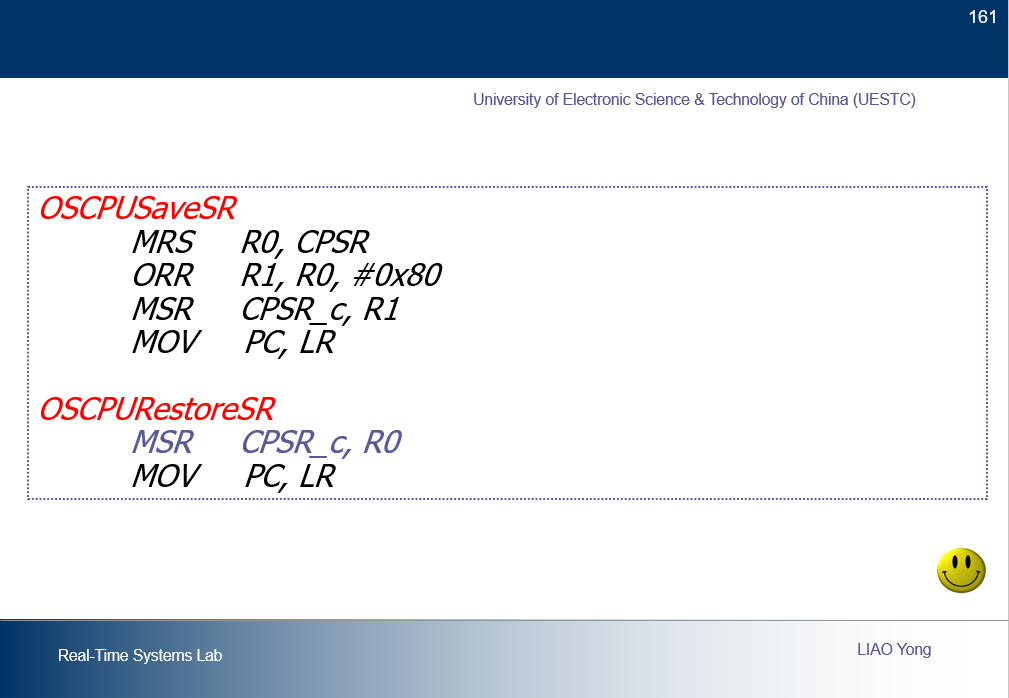
临界区代码保护
1
2
3
4
5
6
7
8
9
10
11
12
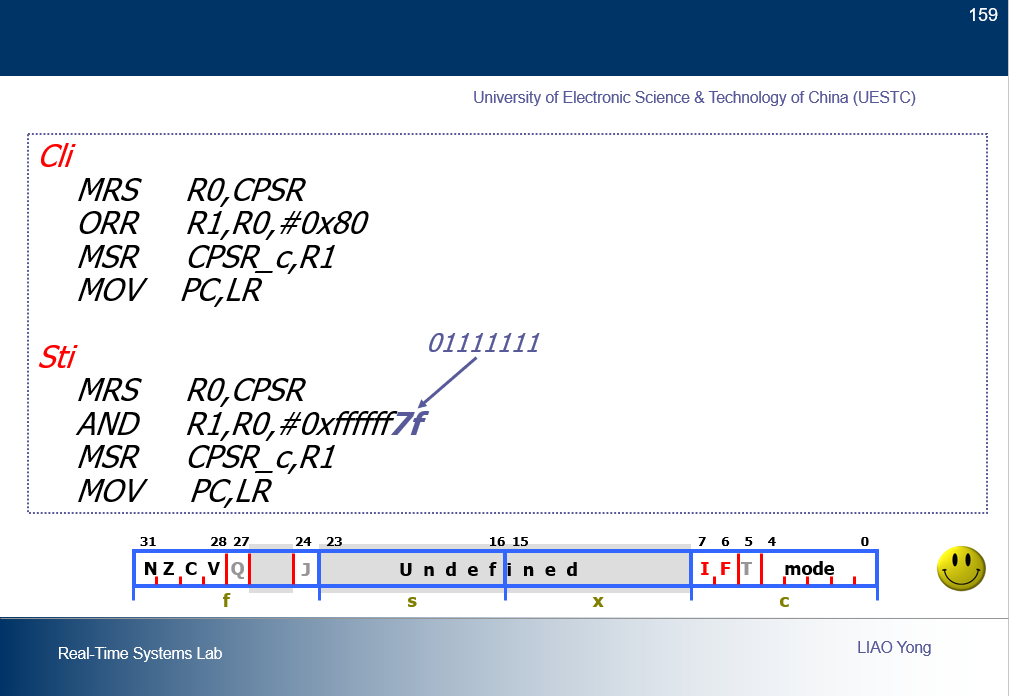
| #if OS_CRITICAL_METHOD==1
#define OS_ENTER_CRITICAL() (Cli())
#define OS_EXIT_CRITICAL() (Sti())
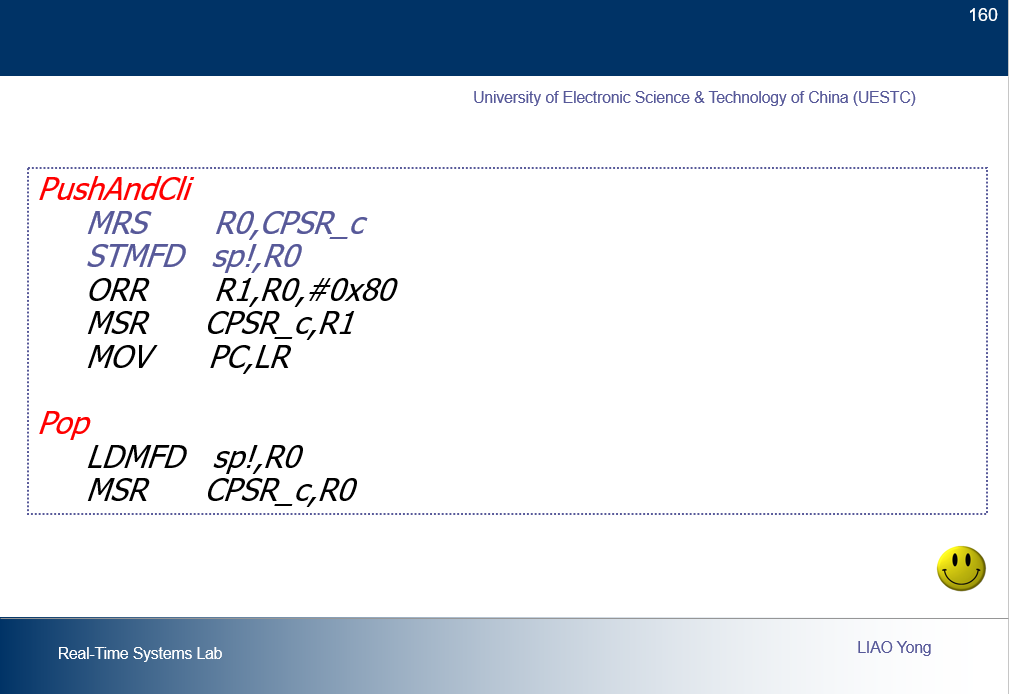
#elseif OS_CRITICAL_METHOD == 2
#define OS_ENTER_CRITICAL() (PushAndCli())
#define OS_EXIT_CRITICAL() (Pop())
#elseif OS_CRITICAL_METHOD == 3
#define OS_ENTER_CRITICAL() (cpu_sr = OSCPUSaveSR())
#define OS_EXIT_CRITICAL() (OSCPURestoreSR(cpu_sr))
#endifCOPY
|
OS_CRITICAL_METHOD==1
OS_CRITICAL_METHOD==2
OS_CRITICAL_METHOD==3
挂载到就绪队列
1
2
3
4
| #if OS_LOWEST_PRIO <= 63
INT8U y;
y= OSUnMapTbl[OSRdyGrp];
OSPrioHighRdy = (INT8U)((y << 3) + OSUnMapTbl[OSRdyTbl[y]]); COPY
|
上下文切换
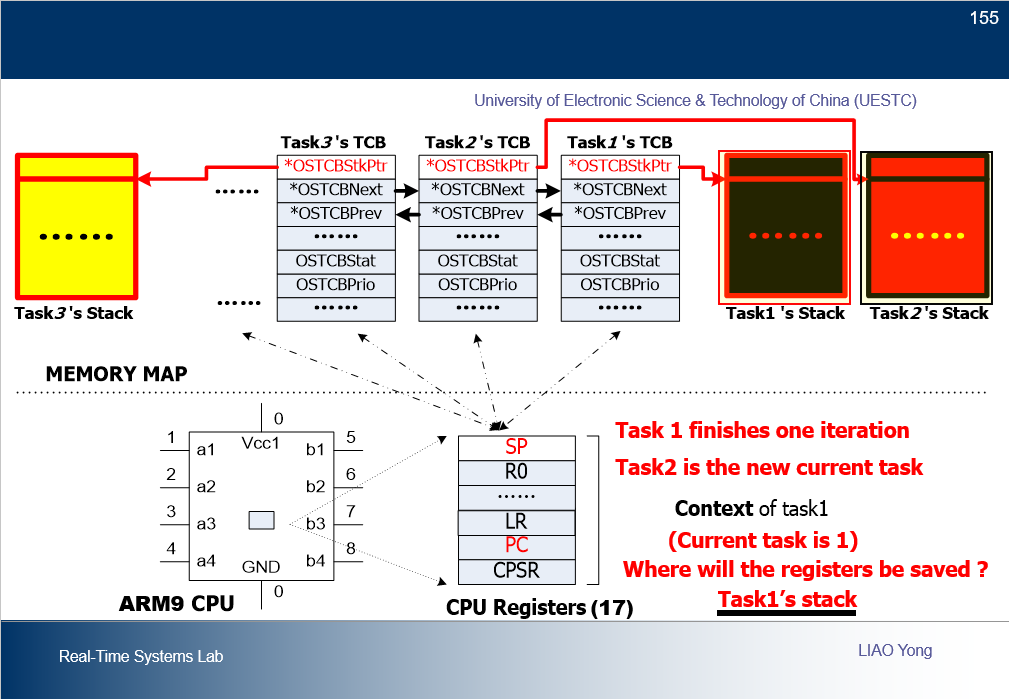
相关概念
上下文切换过程
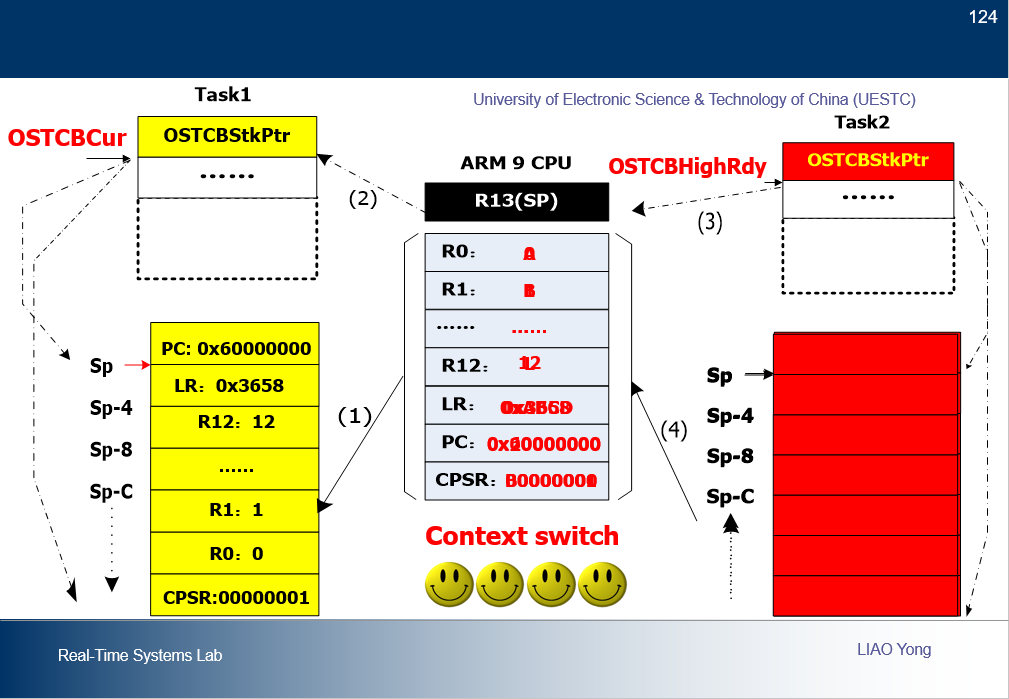
保存上文
1
2
3
4
5
6
7
8
9
10
11
| OSCtxSw:
STMFD SP!, {LR} ;PC ----------------------------------------(1)
STMFD SP!, {R0-R12, LR} ;R0-R12 LR--------------------------(2)
MRS R0, CPSR ;Push CPSR
STMFD SP!, {R0}
;----------------------------------------------------------------------
; OSTCBCur->OSTCBStkPtr = SP
;-------------------------------------------------------------------
LDR R0, =OSTCBCur
LDR R0, [R0]
STR SP, [R0]COPY
|
(1)此时想要保存的PC已经变化,正好等于LR。如果直接保存,此时的PC指向当前正在执行的代码。
(2)此时的LR内的值具体是什么分两种情况。
获取当前最高优先级任务
1
2
3
4
5
6
7
| ;----------------------------------------------------------------------
; OSTCBCur = OSTCBHighRdy;
;----------------------------------------------------------------------
LDR R0, =OSTCBHighRdy
LDR R1, =OSTCBCur
LDR R0, [R0]
STR R0, [R1]COPY
|
将当前TCP指针指向当前最高优先级任务TCB。
1
2
3
4
5
6
7
| ;----------------------------------------------------------------------
; OSPrioCur = OSPrioHighRdy;
;----------------------------------------------------------------------
LDR R0, =OSPrioHighRdy
LDR R1, =OSPrioCur
LDRB R0, [R0]
STRB R0, [R1] COPY
|
将当前最高优先级赋值到当前任务优先级。
恢复现场
1
2
3
4
5
6
7
8
9
10
11
12
13
| ;----------------------------------------------------------------------
; OSTCBHighRdy->OSTCBStkPtr;
;----------------------------------------------------------------------
LDR R0, =OSTCBHighRdy
LDR R0, [R0]
LDR SP, [R0]
;----------------------------------------------------------------------
;Restore New task context
;----------------------------------------------------------------------
LDMFD SP!, {R0} ;POP CPSR
MSR SPSR_cxsf, R0
LDMFD SP!, {R0-R12, LR, PC}^
COPY
|
赋值堆栈指针,指向新任务堆栈,先恢复LR,随即出栈。
调度点
- 中断服务程序结束的时刻。
- 运行任务因资源缺乏被阻塞的时刻。
- 任务周期的开始或者结束的时刻。
- 高优先级任务就绪的时刻。
课后习题
什么是任务?任务有哪几种状态?任务和线程有什么区别?
什么是任务切换?
见任务切换相关概念处。
叙述RTOS如何创建一个任务。
初始化栈
拿到ptos,模拟压栈,顺序。
满递减堆栈,从高位开始往下生长,最先压任务地址,LR、R12、R11……R0,CPSR,栈顶返回psp
*(–stk) = (int32u) 0;
弹出的时候,先出cpsr,最后任务地址弹到PC。
初始化任务TCB
到临界区,去OSTCBFreeList中申请第一个空白TCB。拿到后,往里面放东西
同时XY bitX bitY直接使用prio通过优先级表进行定位查找。
Y = prio >>3(高3位)
bitY = OSMapTbl[Y]
X = prio & 0x07(低3位)
bitX = OSMapTbl[X]
装完后,用上之前那OSTCBPrioTbl[prio] = ptcb 的占位符,然后和OSTCBList里的TCB双向链上(next、prev),作为队首
然后将OSRdyGrp |= bitY 与 OSRdyTbl[Y] |= bitX;OStaskCtr++,退出临界区
OSRdyGrp 表示逻辑上优先级表中有哪些组的优先级有任务就绪。
OSRdyTbl[]表示某一组的8个优先级中有哪些任务就绪
初始化TCBList
先清空OSTCBTbl和OSTCBPrioTbl的空间;
然后两个OS_TCB指针ptcb1 ptcb2来对OSTCBTbl链Next;
最后给TCBList = (OS_TCB*)0 与TCBFreeList = &OSTCBTbl[0];
(真实存在的连续数据结构表就只有)TCB、OSTCBTbl,其他的都是在这个里面的指针串起来的数据结构。
任务调度策略
提高实时任务响应的措施
- 内核可抢占
- 调度时间的确定性
- 中断处理优化
- 数据结构优化
- 内存管理的确定性
中断和时间管理
- 硬中断:传统意义的外部中断,触发的响应属于异步事件
- 自陷:软中断,内部中断,内部显式触发
- 异常:CPU自动产生的自陷,如被0除,非法访问等……
中断请求处理方式
- 中断作为任务切换
- 中断作为系统调用
- 中断作为前台任务
ARM裸板中断机制
两级中断机制,第一级(异常向量表,里面放的时B xxx指令,发生异常后PC会被强制转到对应的位置取值,然后跳转到二级):
- 复位异常:开发板复位时进入管理模式,屏蔽IRQ和FIQ,进入ARM指令模式,PC强制为0,从0处去指执行
- 未定义异常:遇到无法处理的指令时触发,PC强制为0x04
- 软中断异常:SWI……PC强制0x08,进管理
- 预取指异常:……
- 数据终止异常:……
- IRQ:CPU收到外部设备发来的中断请求后,PC强制0x18,进第二级
- FIQ:优先级高于IRQ
2440前后台系统实现
外部中断来了,PC被强转到0x18,然后跳转到服务程序,然后执行服务程序。ISR中间涉及清中断的处理。
中断返回:中断结束后如何返回原程序.
- 进入中断的时候LR的值是当前PC+4,中断返回的时候该是LR-4:
SUB PC,LR,#4
- CPSR存入当前SPSR。
- CPSR设置为相应中断模式(是否屏蔽I位F为)。
- PC强制更新。
- 中断注册:多个中断源如何区分?
2440有一个寄存器叫INTOFFSET,存中断源分配到的整数,这个整数可以为负数,跳到内部异常
1
2
3
4
5
6
7
| ldr r0,=INTOFFSET
ldr r0,[r0]
ldr r1,=HandleEINT0;HandleEINT0是一个内存地址,内容对应一个中断服务程序函数入口
ldr pc,[r1,r0 lsl #2];进入二级向量表,进行注册COPY
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| ISR
SUB LR,LR,#4 ;减4 四级流水
STMFD SP!,{R0-R12,LR} ;保存现场
MRS R0,SPSR 取spsr
STMFD SP!,{R0} 保存
LDR R0,=INTOFFSET
LDR R0,[R0]
LDR R1,=HandleEINT0
ADD R1,R1,R0 LSL #2
LDR R1,[R1]
MOV LR,PC
MOV PC,R1
LDMFD SP!,{R0}
MSR SPSR_cxsf,R0
LDMFD SP!,{R0-R12,LR}
MOVS PC,LRCOPY
|
uCOSII中断管理
中断发生与响应
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
| ISR STMDB SP!,{R0-R2};存r0-r2到当前IRQ模式的堆栈中
MOV R0,SP ;R0存着SP
ADD SP,SP,#12 ;SP+12留3个位置
SUB R1,LR,#4 ;LR-4放R1
MRS R2,SPSR ;SPSR放R2
MSR CPSE_cxsf,#SVCMODE|NOINT ;转到SVC模式,都是SVC的堆栈
STMDB SP!,{R0} ;压IRQ_SP
STMDB SP!,{R3-R12,LR} ;压剩下的到SVC的堆栈
LDMIA R0!,{R3-R5} ;出原来IRQ的R0-R2到现在SVC的R3-R5
STMDB SP!,{R2-R5} ;再和前面的SPSR压回SVC的栈
LDR R0,=OSIntNesting ;中断嵌套计数
LDR R1,[R0]
ADD R1,R1,#1
STRB R1,[R0]
TEQ R1,#1 ;判断是否是1,,如果是1没嵌套,不是就嵌套了
BNE %F1
LDR R0,=OSTCBCur
LDR R0,[R0]
STR SP,[R0] ;sp给到当前TCB的堆栈顶
F1 MSR CPSR_c,#IRQMODE|NOINT 出SVC模式,回到IRQ
LDR R0,=0X4A000014
LDR R0,[R0]
LDR R1,=HandleEINT0
MOV LR,PC
LDR PC,[R1,R0 LSL #2] ;向量表偏移后入口指令给PC,然后执行ISR后回来
MSR CPSR_c,#SVCMODE|NOINT ;切到SVC
BL OSIntExit ;中断返回,有调度点
LDR R0,[SP],#4 ;出栈,把状态字出到R0
MSR SPSR_cxsf,R0 ;恢复状态字
LDMIA SP!,{R0-R12,LR,PC}^ ;全部出栈,恢复COPY
|
中断返回
判断是否嵌套,没有嵌套就从就绪队列中找到最高优先级的任务,把TCB给OSTCBHighRdy,进入中断的上下文切换。
课后习题
阐述中断的概念,说明中断、自陷、异常之间的区别。
以一个开源RTOS为例,给出中断的层次结构,并对总流程及关键步骤进行解释。
开发人员如何在2440的uC环节下实现中断注册?
裸板中断和uC中断处理有哪些主要区别?
uC的TimeTick函数主要功能是什么?如何实现差分时间链算法?提供代码
任务的同步与通信
任务之间的通信、ECB结构与初始化
ECB是一个单独的连续表结构体OSEventFreeList,每一个ECB和一个优先级(任务绑定)
OS_EventWaitListInit():初始化一个ECB的等待队列
OS_EventTaskRdy():使一个任务进入就绪状态(从等待队列中删除最高优先级,然后将该任务就绪)
OS_EventWait():使一个任务进入事件的等待队列
OS_EventTo():因为超时是而使得一个任务进入就绪状态
信号量机制
同步信号量(初始0,加)、互斥信号量(初始1,减)、计数信号量(初始n,加减),不支持中断创建信号量。
OSSemCreate(cnt):创建一个信号量
OSSemPend():获取一个信号量
OSSemPost():释放一个信号量
OSSemAccept():无等待的获取一个信号量
OSSemQuery():查询信号量当前状态
互斥锁
OSMutexCreat() OSMutexAccept() OSMutexDel() OSMutexPend() OSMutexPost() OSMutexQuery()
邮箱机制
实现任务之间或者任务与中断之间通信,发送一个指针类型的变量,该指针包含特定消息的数据结构
OSMboxCreate(*msg) OSMboxDel() OSMboxPend() OSMboxPost() OSMboxAccept() OSMboxQuery()
消息队列
OSQCreate() OSQPend() OSQPost() OSQPostFront() OSQAccept() OSQFlush() OSQQuery()