Introduction of ROS2
当前ROS2已经成为了应用最为广泛的机器人应用程序开发SDK之一,它拥有先进的分布式架构、更好的可靠性、实时性以及嵌入式设备支持。ROS2的诞生主要源于以下三个方面:
- ROS1的历史遗留问题
- 机器人技术经过多年的发展产生了新的需求
- 在ROS发展的时间里产生了很多新的技术
History from ROS to ROS2

ROS最初的设计是为了给使用Willow Garage PR2机器人进行研究的项目或实验室提供便于使用的软件开发工具。为了提高系统的通用性,开发团队在抽象层花了很多功夫,特别的消息接口的设计与实现上。因此ROS具有了极高的复用性,大部分组件也可以用在其他大部分的机器人应用程序中。但是在当时ROS诞生的时期,也主要是面向学术研究使用,研究人员的主要需求也就如下一些内容:
- 应用于单个机器人
- 拥有工作站级别的计算资源
- 基本没有实时性要求(有实时性要求的组件会有特定的解决方案)
- 高性能的网络连接能力(大带宽的有线或近距离无线连接)
- 主要应用于学术研究,最大化灵活性,没有任何限制和约束
这些特性在ROS中都有着不错的实现,能比较完美地满足之前所提出的需求。但是ROS得发展远远超出了开发团队得预期,无论是轮式机器人、足式机器人甚至是工业机械臂等商业产品和项目都在应用ROS框架进行软件开发。随着应用场景的日益增加,也就伴随了新需求和新技术。
如今新的场景与需求:
- 集群机器人开发(当前也有许多开发者使用ROS进行集群开发,但是业内目前没有统一的标准,大部分开发者也只是在ROS当前的单master节点上进行hack)
- 对于嵌入式设备的支持(让裸板的嵌入式设备原生接入ROS,而不是通过上位机的驱动接入)
- 实时性要求(在ROS上原生支持实时控制,而不用像之前一样通过特定的组件)
- 非理想网络条件(用来应对延迟、丢包、断连的场景)
- 应对生产环境(更好的稳定性和真实环境中的鲁棒性)
- 构建系统的规范与限制(在保持灵活性的同时让系统或配置更有条理)
New technologies
ROS2依然是围绕着最核心的匿名消息发布和订阅机制进行起草的,在ROS1的基础上引入了许多新技术来满足新的需求,例如:
- Zeroconf(零网络配置,用于快速组网)
- Protocol Buffers(跨平台序列化数据结构的协议)
- ZeroMQ (and the other MQs)(异步消息传递库,应用于分布式或并发应用程序)
- Redis(分布式高性能缓存服务)
- WebSockets
- DDS (Data Distribution Service)(实时数据分发服务)
Build Tool
在ROS生态中,应用程序通常被分割为许多软件包,开发人员同时处理多个软件包的场景也是很常见的。这与传统的软件开发流程中开发者只面对一个软件包,并一次性提供所有需要依赖的软件包(这部分依赖通常没有迭代)的场景形成了鲜明对比。
构建一组软件包的“手动”方法包括逐一构建所有软件包。对于每个软件包如何管理相互之间的依赖关系,如何设置环境以构建软件包,以及如何在之后设置环境以使用软件包。如果没有自动化该过程的工具,这样的工作流程在规模化开发时是不切实际的。
在ROS1中有多个工具提供以上流程的自动化支持,即 catkin_make、catkin_make_isolated和 catkin_tools。对于ROS 2,提供此功能的构建工具称为 ament_tools。
Build tool & build system
构建工具在一组软件包上运行,它确定依赖关系图,并按拓扑顺序为每个包调用特定的构建系统。ROS所使用的构建工具有 catkin_make、catkin_make_isolated、catkin_tools和 ament_tools。
构建系统在单个软件包上运行。例如 Make、CMake、Python Python setuptools。例如cmake软件包通过以下流程完成构建:cmake,make,make install。
Goals of ament_tools
统一构建工具的目标是构建一组具有单向依赖的软件包。它应该适用于ROS 1软件包以及在其清单文件(package.xml)中提供必要信息的ROS 2软件包。它还应该适用于本身不提供清单文件的软件包,因为必要的元信息可以推断或外部提供。这将允许将构建工具用于非ROS软件包,例如Gazebo的某些插件和SDFormat格式的地图信息。
Build pipeline of ament_tools
初始化构建环境⬇️
识别并组织不同的构建系统⬇️
计算软件包依赖拓扑⬇️
调用构建系统完成构建⬇️
Related topics
超出构建工具之外的能力
- 应对包含多种构建系统的工程
- 拉取源代码 rosinstall_generator
- 安装依赖rosdep
- 创建和发布二进制包 bloom
DDS
What is DDS
DDS提供了一种发布-订阅传输,这与 ROS 的发布-订阅传输非常相似。DDS使用对象管理组 (OMG)定义的“接口描述语言(IDL)”来进行消息定义和序列化。
DDS默认提供了发现系统,以支持任意两个节点的通讯而不需要ROS master这样的工具。这样使得系统拥有分布式特性,具有更好的容错性。当前DDS已经应用在了战舰、航空器、空间站等重要的设施中,有良好的可靠性和灵活性。
DDS in ROS2
但据开发者而言DDS的可靠性和灵活性是以复杂性为代价的,ROS2的主要工作就是解决API和DDS配置的复杂性。ROS2的目标就是隐藏DDS的实现细节以及特定的接口和消息定义,提供DDS的节点发现、发布-订阅,以及底层消息序列化。这使得从用户的角度而言隐藏了DDS的绝大部分复杂性,与ROS1的接口调用方式相似。同时ROS2也为部分具有特殊需求的用户提供了对底层DDS接口的访问路径。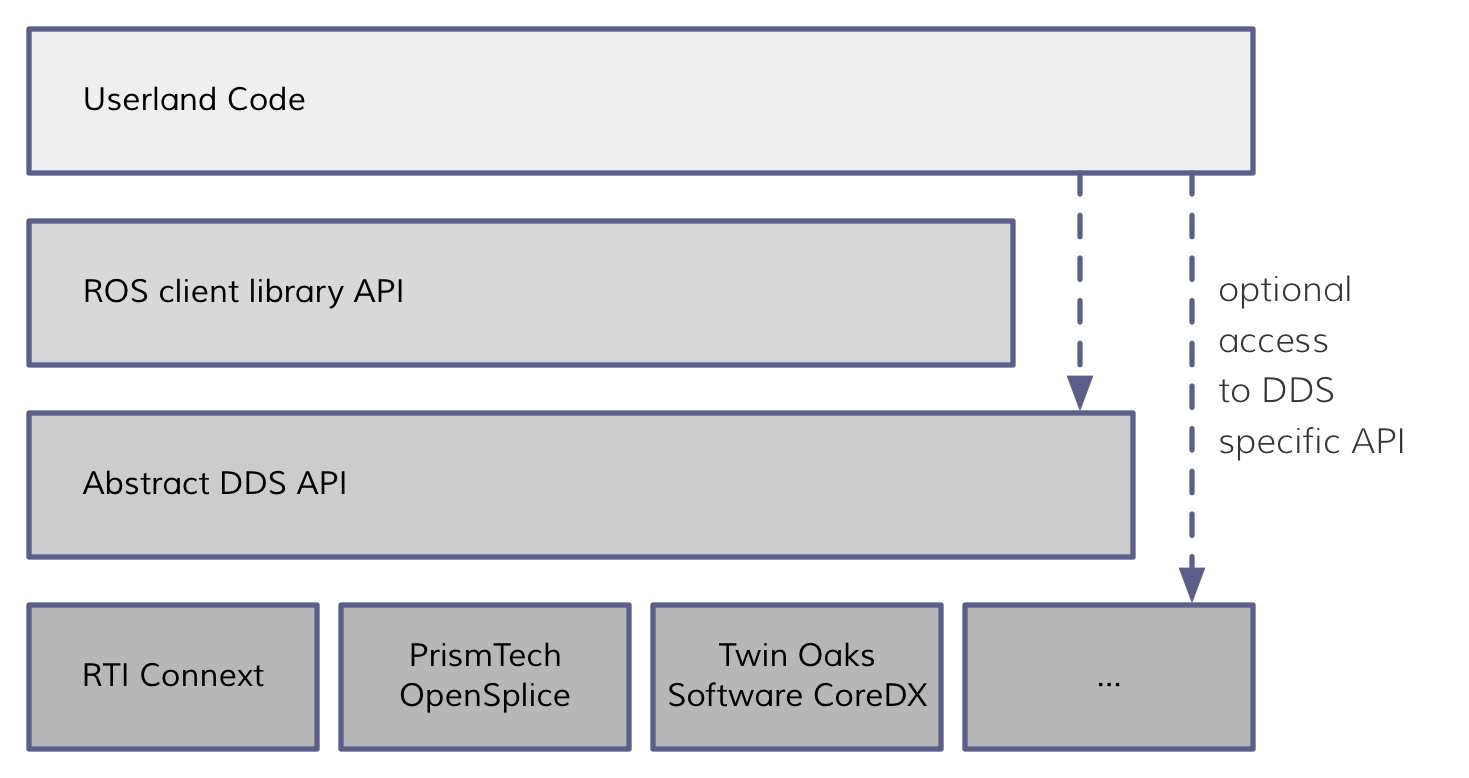
Discovery system
DDS通过发现系统完全取代了ROS master,ROS本身只需要通过DDS API来获取节点列表,而不依赖于master。因此在默认情况下DDS是完全分布式的,不存在系统各部分相互通信时出现中心故障点。
More
- DDSI-RTPS(实时消息通讯协议)
- shared-memory transport
- .msg -> .idl
…
Compared with ROS1
| ROS1 | ROS2 | |
|---|---|---|
| 操作系统 | 最初仅支持应用于Linux操作系统(之后官方也有提供Windows的版本) | 完全跨平台,支持Linux、Windows、MacOS甚至RTOS |
| C++标准 | C++03 | 主要是C++11和14,之后会逐步迁移到C++17 |
| 构建系统 | catkin | colcon(ament_cmake)原生支持除cmake外的一些构建系统 |
| isolated build | 默认整体构建,可选是否单独构建某一个软件包(每个包需要保证依赖完整,同时共享命名空间容易造成命名冲突) | 仅支持单独构建每一个包 |
| 中间件 | 采用TCP/IP协议作为通讯标准 | 使用了实时的通讯框架DDS以满足实时性要求 |
| 应用框架 | 采用单master架构设计,一旦master节点出现问题,整个系统将无法工作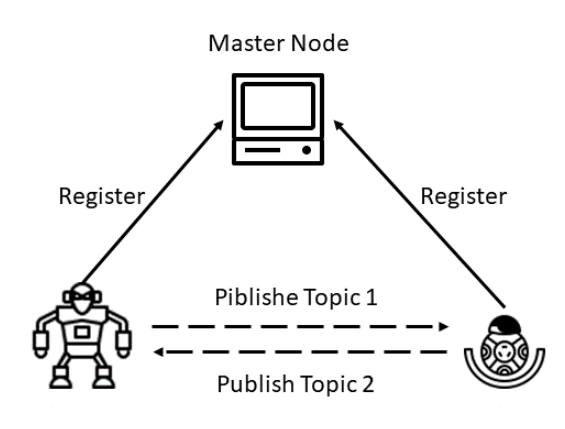 |
采用了分布式的发现机制组网,这样其中的任何一个节点出现异常都不会导致整个系统停止工作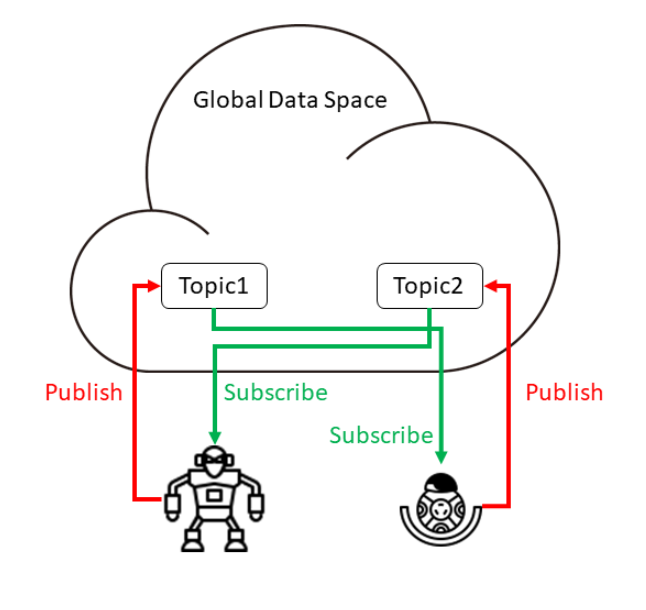 |
Migrate to ROS2
Prerequisites & Steps
Migration example
ROS1: https://github.com/Jason-xy/VINS-Fusion/tree/master
ROS2: https://github.com/Jason-xy/VINS-Fusion/tree/cuda